Andruav Simulation using SITL
You do not need to have a real drone to test Andruav cabapilities. Actually it is recommended to use SITL simulation to test Andruav before actually flying long range with your drone.
If you want more real action then maybe you can try Webots SITL to have a real taste of how using Andruav really feels.
Connecting to SITL
Andruav connects tp SITL or Webots-SITL in the same way. The easiest way is set Andruav-Drone mobile FCB screen to connect using UDP. You need to specify the listening port. In SITL simulator make sure that it sends UDP packets to mobile IP address on the specified port.
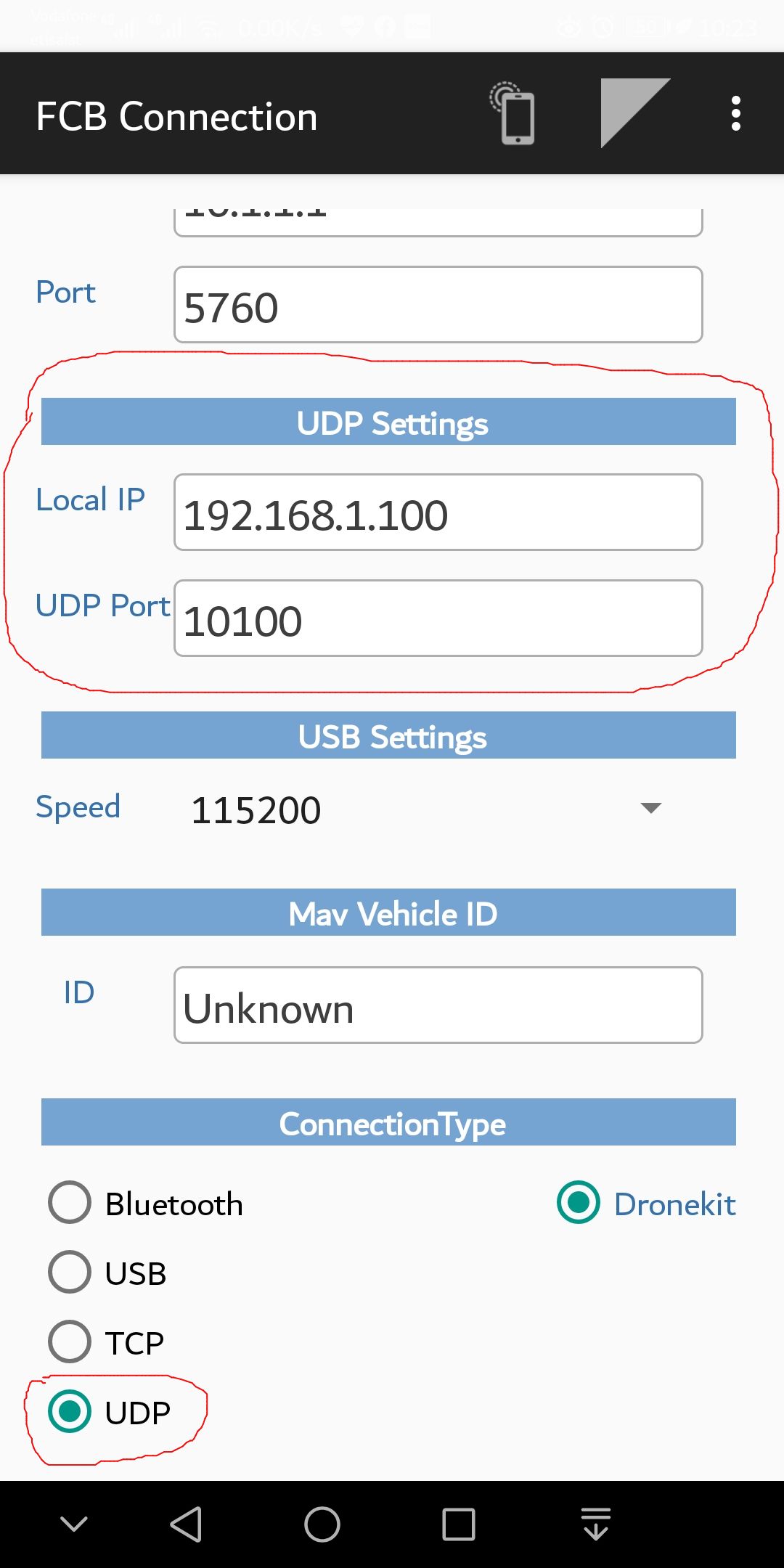
$ ~/ardupilot/Tools/autotest/sim_vehicle.py -j4 -v ArduCopter -M --out=udpout:127.0.0.1:14550 --out=udpout:192.168.1.100:10100
The above example sends UDP packets to 127.0.0.1 port 14550 as well as 192.168.1.100 port 10100. So you can use a separate Mission Planner or QGC not connected to Andruav to test the drone in parallel.
Tip
give static IP to your mobile so it you do not need to change IP address each time.
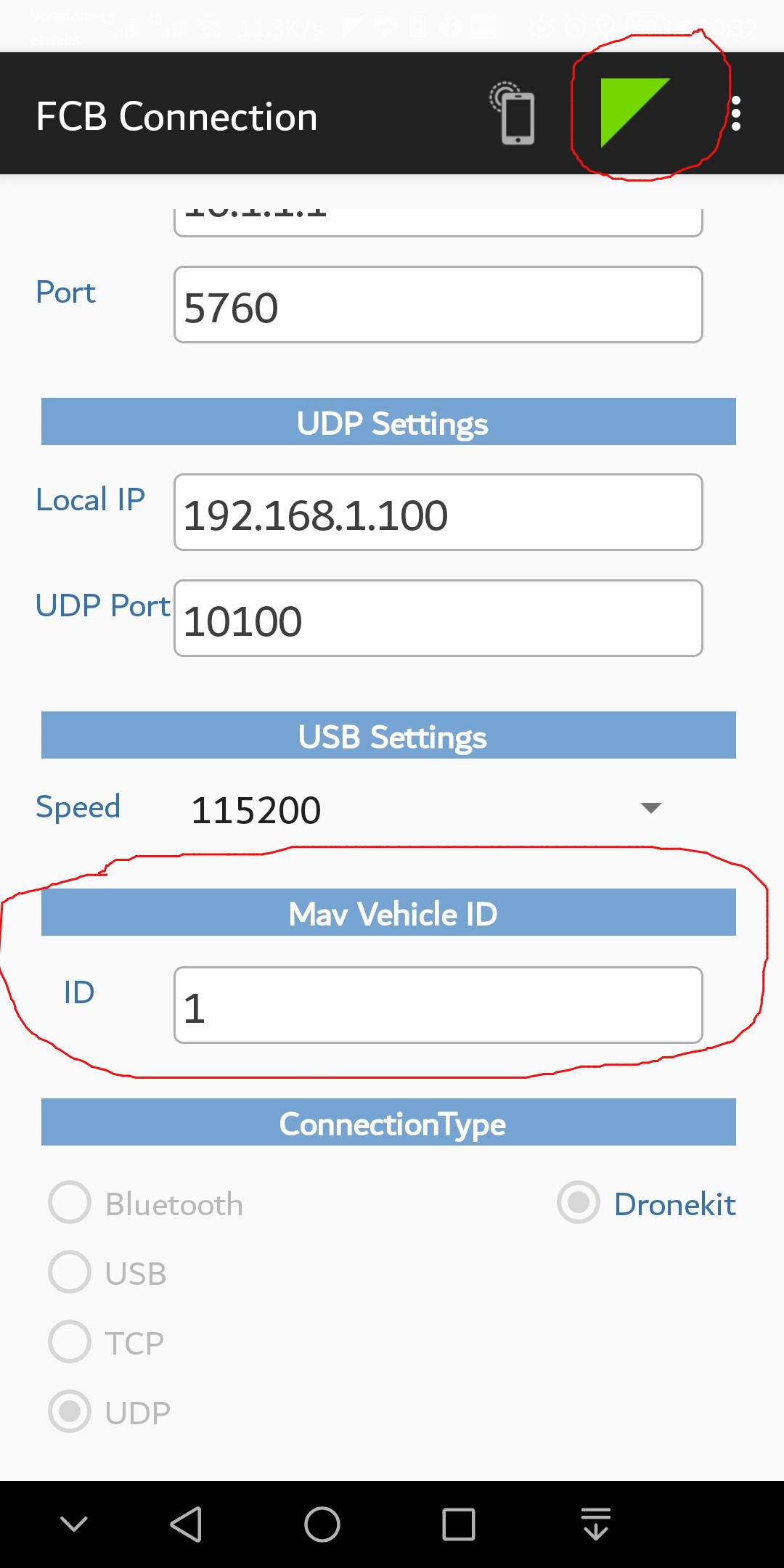
Once Andruav is connected to FCB board it should give you an indication and the FCB button turns green.
 and
and