All In One Board
In this use case, we will combine the power of Drone-Engage with OBAL Board and use a single RPI-4 board to run both FCB & Companion Computer.
Tip
Raspberry Pi-4 is all you need to have a drone that is you can control from Internet, stream video over GSM networks and access it from anyplace in the world.
Technical Points
Since Ardupilot is a realtime system and we are flyiing a quadcopter, so response time should be accurate and fast. The solution to this point was using CPU affinity . Since RPI-4 has 4 cores. we isolates two of them for running Ardupilot. The remaining 2 cores are enough for running Drone-Engage pro version with Camera Module.
We can easily do that by editing /boot/cmdline.txt and add isolcpus=1,2
console=tty1 root=PARTUUID=414e6dda-02 rootfstype=ext4 elevator=deadline fsck.repair=yes rootwait isolcpus=1
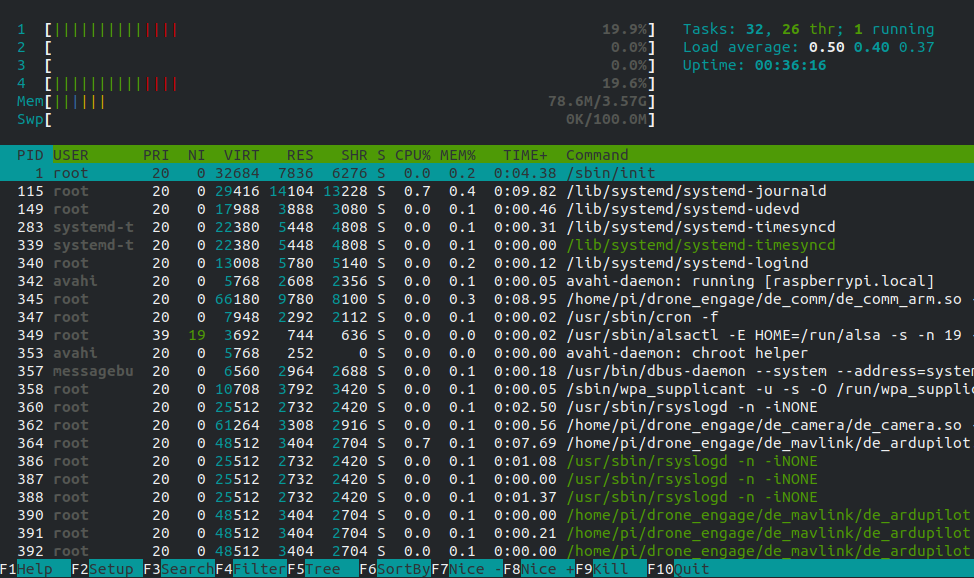
As we can see from the above image that htop command shows core 1,2 with 0% utilization.
Then we can execute Ardupilot with the following parameters:
/home/pi/arducopter -A udp:192.168.1.144:14550:bcast -C /dev/serial0 -c 1
In this case ardupilot will use core 1,2 only, and no other process will use share cores with it. This way helps to ensure stability.